In class I sometimes need to use matrices of eigenvalues and eigenvectors, but the output of eigenvectors() isn’t particularly helpful for that out of the box.
Here are two one-liners that work in the case of simple eigenvalues. I’ll post updates as needed:
First eigU(), takes the output of eigenvectors() and returns matrix of eigenvectors:
eigU(v):=transpose(apply('matrix,makelist(part(v,2,i,1),i,1,length(part(v,2)),1)));
And eigdiag(), which takes the output of eigenvectors() and returns diagonal matrix of eigenvalues:
eigdiag(v):=apply('diag_matrix,part(v,1,1));

For a matrix with a full set of eigenvectors but eigenvalues of multiplicity greater than one, the lines above fail. A version of the above that works correctly in that case could look like:
eigdiag(v):=apply('diag_matrix,flatten(makelist(makelist(part(v,1,1,j),i,1,part(v,1,2,j)),j,1,length(part(v,1,1)))));
eigU(v):=transpose(apply('matrix,makelist(makelist(flatten(part(v,2))[i],i,lsum(i,i,part(v,1,2))*j+1,lsum(i,i,part(v,1,2))*j+lsum(i,i,part(v,1,2))),j,0,lsum(i,i,part(v,1,2))-1)));







 , including cases when
, including cases when  is non-square and/or non-invertible.
is non-square and/or non-invertible.

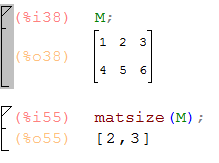
 In Maxima, length(M) gives the number of rows, and so length(transpose(M)) gives the number of columns. I put those together in a little widget matsize() that returns the list [m,n] for an
In Maxima, length(M) gives the number of rows, and so length(transpose(M)) gives the number of columns. I put those together in a little widget matsize() that returns the list [m,n] for an  matrix
matrix